
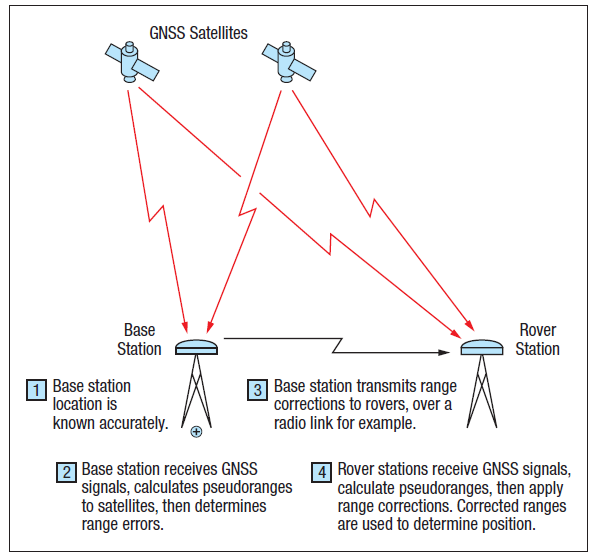
การหาค่าพิกัดตำแหน่งลักษณะนี้เป็นวิธีการหาค่าโดยใช้หลักการเปรียบเทียบกันระหว่างจุดสองจุด โดยเครื่องรับสัญญาณ GNSS เครื่องหนึ่งจะวางรับสัญญาณที่หมุดหลักฐานซึ่งรู้ตำแหน่ง X,Y,Z ที่แน่นอนแล้ว (known coordinate) เครื่องรับนี้ถูกเรียกว่าสถานีฐาน (Base station) และนำเครื่องรับสัญญาณเครื่องที่สองไปยังจุดที่ต้องการหาตำแหน่งเปรียบเทียบกับสถานีฐาน โดยจะถูกเรียกว่ารีโมท (Rover)
หลักการทำงานของการหาตำแหน่งแบบสัมพัทธ์ คือ Base station และ Rover จะต้องรับสัญญาณดาวเทียมกลุ่มเดียวกันเวลาเดียวกัน โดย Base station จะทำหน้าที่เหมือนจุดอ้างอิง และส่งค่าปรับแก้คลื่นสัญญาณ (correction data) * ณ เวลานั้นๆ ไปยัง Rover และ Rover สามารถนำค่าปรับแก้ที่ได้รับมาไปใช้เป็นค่าแก้สำหรับคำนวณตำแหน่งของตัวเองได้ในทันที (real-time) ให้มีความถูกต้องมากยิ่งขึ้น
โดยหลักๆแล้วจะแบ่งออกเป็น 2 ประเภท
- การใช้ค่าปรับแก้จากสัญญาณ L1 (DGNSS)
การส่งค่าปรับแก้ลักษณะนี้ทาง Base station จะส่งค่าปรับแก้ของสัญญาณ L1 ไปยัง Rover ทำให้ค่าพิกัดที่ Rover ได้มีความแม่นยำอยู่ที่ 40cm – 60cm โดยปกติ Base station และ Rover จะอยู่ห่างกันไม่เกิน 60km ใช้ในลักษณะงานที่ต้องการความแม่นยำระดับต่ำกว่าเมตร เช่น การเดินเรือทะเล
- การใช้ค่าปรับแก้จากสัญญาณ L1L2 (RTK)
การส่งค่าปรับแก้ลักษณะนี้ทาง Base station จะส่งค่าปรับแก้ของสัญญาณ L1L2 ไปยัง Rover ทำให้ค่าพิกัดที่ Rover ได้มีความแม่นยำสูงสุดอยู่ที่ 1cm โดยความแม่นยำจะแปรผันตามระยะห่างระหว่าง Base station และ Rover ในกรณีรังวัดแบบ RTK ระยะห่างจาก Base station และ Rover จะอยู่ห่างกันไม่เกิน 20km
ตามที่กล่าวมาข้างต้น จะพบกว่าการรังวัดลักษณะนี้เครื่องรับสัญญาณทั้ง 2 เครื่อง ต้องมีการติดต่อสื่อสาระหว่างกัน โดยปกติแล้วเราสามารถใช้ช่องทางสื่อสาร RF 433MHz, WIFI หรือ 3G ในการสื่อสารได้
*ค่าปรับแก้จะอธิบายเพิ่มเติมในบทความถัดไป